
The Logistics Robot
Students: Thorsten Kaske, Michaela Regneri, Michael Roth
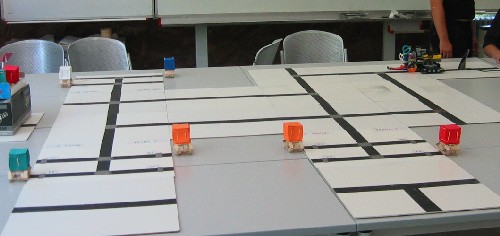
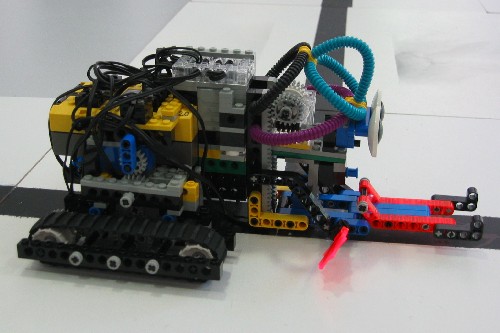
This robot moves containers around an imaginary dock with warehouses. The map of the dock is marked as black lines on a white background. Intersections are marked grey. The robot uses a light sensor pointed at the ground to recognise the colour of the ground, and follows the lines accordingly.
The greatest hardware challenge was to detect intersections reliably: The exact sensor readings are very sensitive to ambient lighting, and there are significant variations in the sensor values for the black lines, especially at tile borders. On the software side, the entire map of the dock, together with a path-finding algorithm, had to be squeezed into the 12K of the robot's memory that Lejos leaves to the user.
The dialogue system accesses a database that relates the containers to their current locations and their contents. This enables it to process rather varied commands, such as "Move container 43 to location 12", "Move the fish container to Warehouse A", or "Move all diamonds to Warehouse C". After each command, the robot autonomously finds a path around the map, and then returns to its start position after completing the orders; it can't receive commands from just anywhere because the Lego infrared communications system requires a straight line of sight between the transmitters.
Movies:
(you need the free XviD codec to
view the movies)
- (none available yet; check back later)